跳躍太空機器人 有望克服低重力探索小行星






【新唐人亞太台 2024 年 04 月 29 日訊】人們對小行星中稀有礦物和資源的興趣日益濃厚,但是許多行星的低重力卻往往成為探勘的阻礙。現在瑞士就有一組研究人員找到,跳躍更能接觸行星表面,並研發出一款跳躍機器人,或許能代替太空人員進行探測,成為未來的探勘之道。
人類對外太空的小行星或月亮的星球探索未停歇。不過行星的低重力和微薄大氣層,往往使得傳統的輪式系統探測儀器使用困難。
而瑞士一組研究人員正研發一款名為SpaceHopper,適合月球或行星的機器人,來解決這個問題。
蘇黎世聯邦理工學院博士生 菲利普·阿姆:「我們的想法是使用跳躍機器人,它不僅可以使用腿進行跳躍,還可以在跳躍和飛行時控制其姿態,並在這個棘手的環境中進行可控運轉。」
這款機器人有三條機械腿,每個腿都能做三個方向的屈曲,並配置有九個馬達,讓機器人能夠做到最高效率的跳躍與平衡,並迅速獲取研究樣本。
蘇黎世聯邦理工學院博士生 菲利普·阿姆:「它基本上就像貓跳下來時所做的那樣。所以它利用它的腿和腿的慣性來保持身體直立,或者嘗試讓身體進入預定的方向,這樣就可以安全的再次著陸」。
目前該團隊已經與歐洲太空總署,針對這款能在太空跳躍的機器人,在零重力和擬微重力的環境下進行拋物線飛行測試,並不斷進行完善中。
新唐人亞太電視 賴琍雅 綜合報導
相關新聞
-

跳躍太空機器人 有望克服低重力探索小行星
2024-04-26 13:56:12人們對小行星中稀有礦物和資源的興趣日益濃厚,但是許多行星的低重力卻往往成為探勘的阻礙。現在瑞士就有一組研究人員找到,跳躍更能接觸行星表面,並研發出一款跳躍機器人,或許能代替太空人員進行探測,成為未來的探勘之道。
-
調酒機器人成話題 太空人要喝酒也OK
2015-10-04 16:38:34機器人手臂可以造車或用在其它工業用途,但有看過機器手臂調酒嗎?最近義大利一家公司研發出用手機應用程式控制的機器酒吧系統,可以讓顧客自己成為自己的調酒師。另外,還有一家公司研發出一款新酒杯,據說可以讓人在太空中也能用杯子品酒。
-
NASA發現「超級地球」 或可孕育生命
2019-08-08 00:13:06美國太空總署上週三(7月31日)宣布,發現了一顆距離太陽系只有 31 光年的行星,其表面條件可能可以孕育生命,並適合居住。
-
NASA太空機器人 設計靈感來自《星球大戰》
2018-03-09 21:39:31NASA將於2019年向國際空間站發送 ?飛行機器人Astrobee Robot ,而這個太空機器人的設計靈感,竟然是來自《星際大戰》的「訓練遙控器」。
-
俄羅斯首發「人型機器人」成功進入太空站
2019-09-06 17:02:28繼美國與日本之後,俄羅斯也將人形機器人費爾德送上太空站工作,雖然歷經一次失敗,最終還是在8月26號與國際太空站成功對接,讓費爾德能有機會支援較危險的太空任務。
-
直擊東京尖端科技展 上銀台達電奪目
2014-07-26 23:47:15這星期在東京舉辦的尖端科技展,25號落下帷幕。期間有將近500家來自日本海內外廠商參展。涵蓋能源、零組件、自動科技等。多家台灣大廠也參展,請看我們來自東京的報導
-
在太空待半年 人最懷念地球的是?
2018-11-29 01:19:49許多人小時後曾夢想作個太空人,不過太空甚麼都沒有,生活也很嚴苛,如果真的住上一段時間,您會最懷念地球上的什麼呢?英國第一位太空人蒂姆皮克,在國際太空站待了近6個月,他在即將返回地球時說,最想念地球上的「雨」了。
-
神秘的撒哈拉之眼 通往平行宇宙之門?
2018-09-10 22:16:51非洲撒哈拉沙漠,是世界上最大的沙漠。從太空中俯視撒哈拉沙漠時,會發現有一個清晰可見的大眼睛,鑲嵌在其中,和人眼的相似度 精確到瞳孔,仿佛有神奇的力量吸引人 想忍不住去看它,對看幾秒後,又會感覺它在靜靜凝望著你。因此它被稱為「撒哈拉之眼」。
-
如同樹上騎機車!新發明「爬樹機」採檳榔
2019-06-25 22:14:17到處爬上爬下是許多人童年的美好回憶,但長大後會想以爬樹為業嗎?在印度南部,種植檳榔的果農要採收檳榔,只能用雙手和繩索爬上15到30公尺高的檳榔樹去摘取,由於太過危險,越來越少人願意從事這項職業。最近,一位果農發明了一項厲害的爬樹機器,只需短短30秒內就能爬到樹頂,快速又安全的採收方式,讓果農們為之興奮。
-
日本「太空電梯」計畫 首次試驗上太空!
2018-09-19 18:22:41日本研究團隊將於本月11日,首次發射迷你版太空電梯上太空。太空電梯的一端將保持在地球表面,另一端則將被固定在國際太空站。若一切順利,將大幅降低向太空站運輸人員、貨物的成本,未來也可望搭載乘客進入太空。
-
中科院大型無人攻擊機 首度曝光
2015-08-12 20:50:462015國際航太國防工業展,明天(13)開始在台北世貿館展出。其中中科院研發的大型無人機首度曝光,成為焦點。
-
鴻海佈局「關燈工廠」Foxbot大軍拓展商用
2016-08-09 14:15:14外電報導,鴻海自行發展的機器人技術,如今已經更加成熟,不只內部實現100%自動化,研發的工業機器人「Foxbot」,還可能將投入商用市場銷售,這項消息引起外界關注。
-
孤單升級?日本推出「有溫度」陪伴機器人
2019-01-04 21:37:45最近日本推出一款新的陪伴型機器人,不但擁有可愛的企鵝造型,還不同於一般冰冷的機器,可以隨時「加熱」,給人溫暖的擁抱。不過,這是否也襯托出,人類的孤單更加升級了呢?
-
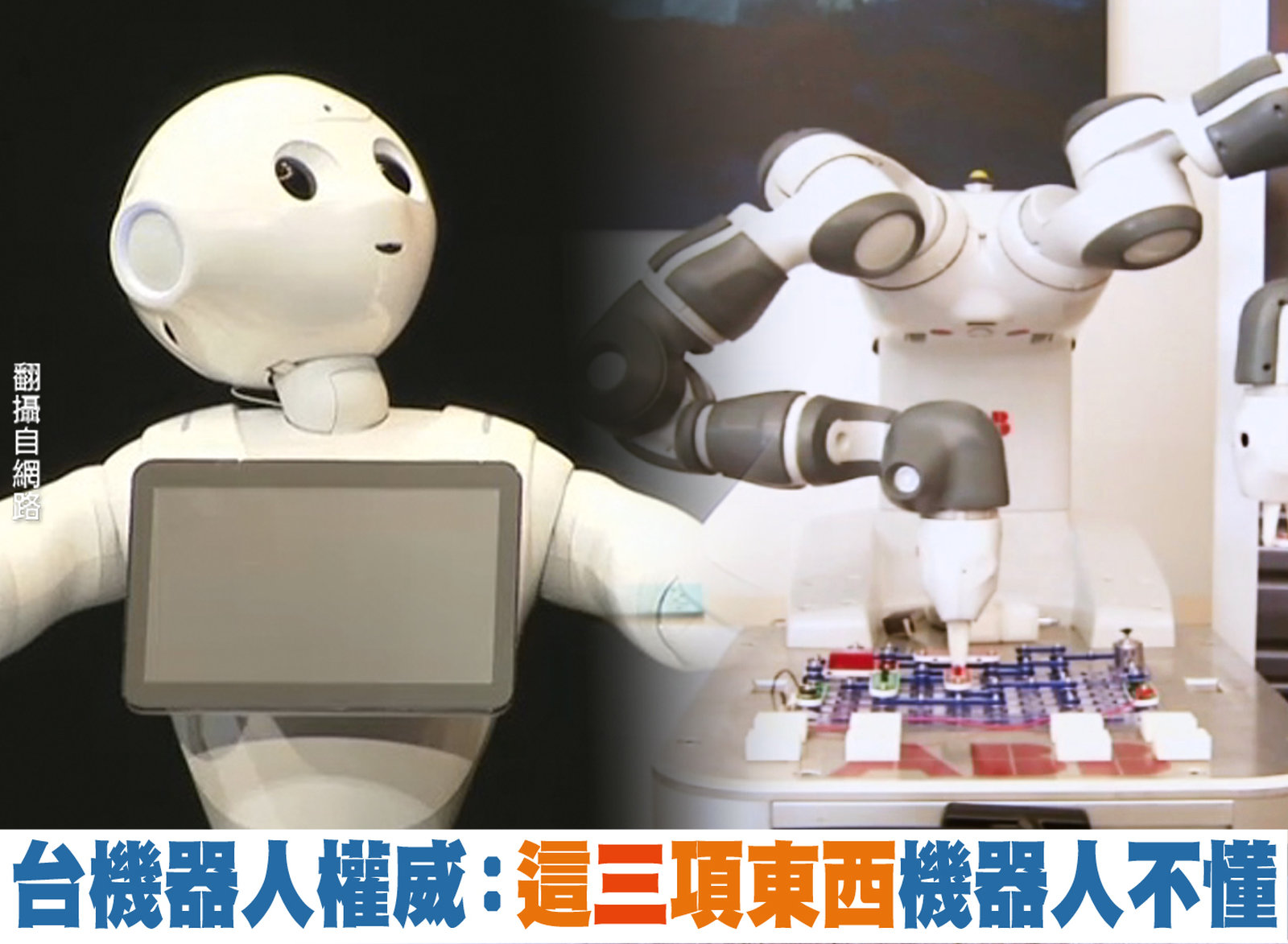
台機器人權威:這三項東西機器人不懂
2016-05-04 13:01:05歐美日都想挖角的台灣機器人教父羅仁權,日前到美國矽谷參加「台美產業科技協會」,探討智慧機器人和自動化的未來,羅仁權還透露,有三項東西,是目前機器人學不來的。
-
工研院機器手臂 軟硬都是台灣製造
2011-08-24 21:50:43機器人的研發大家可能都認為是日本或歐美專有技術,其實在台灣,藉由台灣IC及各種產業的技術提升,機器人的技術已經相當成熟,在工研院努力下所有的零件軟硬體已經都是ALL MADE IN TAIWAN,在台北國際機器人展開展前,跟著我們的新聞鏡頭,帶您先一睹為快。
-
和碩迎接AOE時代 AI機器人新品打頭陣
2018-06-08 21:25:56國內組裝代工廠之一的和碩,宣布全面進軍人工智慧,今天由董事長童子賢帶頭,大規模展示新品,秘密打造的全方位家用機器人,還有具備保全和定位能力的商務機器人,都是首次亮相,童子賢認為,AI將影響帶動電子產品發展,台灣更具備優勢。
-
日本看護機器人興起 對抗高齡化社會
2018-12-29 23:50:02日本老年安養中心正掀起一場機器人革命,在高齡化社會的日本,勞動力短缺,機器人看護在日本將可能成為一種自然。除了看護,日常的陪伴也有機器寵物可以替代,填補了醫護人員的短缺。那麼,年長者對機器人的評價又是如呢?
-
核安演習 「偵檢機器人」首露面
2011-05-18 21:41:33核安演習第二天,今天的重點在於核二廠出動偵測輻射的機器人,模擬在輻射外洩的情況下,首度由機器人出動,偵測輻射濃度,避免人員被輻射污染。
-
台灣防疫驚豔國際!小學生造樂高酒精噴霧機器人
2020-03-16 13:02:54高雄市林園國小為防疫噴灑酒精手部消毒,師生利用樂高積木結合感測設備,組裝出自動感應酒精消毒機器人,讓學生不用用手按壓酒精瓶,雙手靠近機器人就能自動噴灑酒精消毒,減少接觸感染。
-
紀念阿姆斯壯登月50周年 珍貴畫面首曝光
2019-05-14 19:43:161969年7月20日,人類成功執行了第一次登月任務,也就是大家所知的阿姆斯壯登陸月球,為了慶祝50周年,紐約市科學館舉行了系列活動。